[論文介紹] OctoTools: An Agentic Framework with Extensible Tools for Complex Reasoning
1 前言
本篇文章介紹 OctoTools: An Agentic Framework with Extensible Tools for Complex Reasoning 論文,OctoTools 的 5 位作者都是來自 Standford,並於 2025 年 2 月將這篇發論文表於 arXiv 上。
OctoTools 是一個 Training-Free 且 Open-Sourced 的 Agentic Framework,目的在於提昇 LLM 的 Task Planning 與 Tool Usage 能力,進而提昇 LLM 在 Multi-Step 任務上的表現。
OctoTools 的 Github 截至 2025 年 5 月,已經累積了 1.2K 個 Star,說明這個專案也是頗熱門的。此外,Discover AI 也有錄製一段 OctoTools 的介紹影片,有興趣的讀者也可以參考看看!
2 OctoTools 想解決的問題
最近幾年有各種不同的 Agentic Framework 方法被提出,這些 Agentic Framework 本質上就是讓 LLM 透過 Planning 與 Execution 等步驟不停迭代,來處理更複雜更有彈性的問題。
然而,有些 Agentic Framework 方法 (Toolformer (NeurIPS 2023), LLaVA-Plus) 需要對 LLM 進行 Training,有些方法 (Visual Sketchpad (NeurIPS 2024), WebWISE (NAACL 2024)) 則侷限在 Specific Domain。當然也有 Training-Free 且適用 General Domain 的方法 (Chameleon (NeurIPS 2023), HuggingGPT (NeurIPS 2023)),然而在 Multi-Step 任務上的表現卻不盡理想。
因此,OctoTools 正是希望提出一個 Training-Free 且適用在 General Domain 的 Agentic Framework 方法,同時在 Mulit-Step 任務上有更好的表現。
如果你是第一次接觸 LLM Agent 領域,務必先閱讀我們之前介紹過的 LLM Agent 經典論文 — HuggingGPT,理解 LLM 如何透過 Planning 以及 Execution 框架來處理 Multi-Step 任務。
如果還有餘力的話,也可以再閱讀我們之前所介紹的 PLAN-AND-ACT 以及 Pre-Act。這 2 篇論文與本篇文章要介紹的 OctoTools 都是在 2025 年上半年所發表,但是更著重在 Planning-Execution 框架上,方法上會比 OctoTools 更單純,因此適合先閱讀!
3 OctoTools 方法介紹
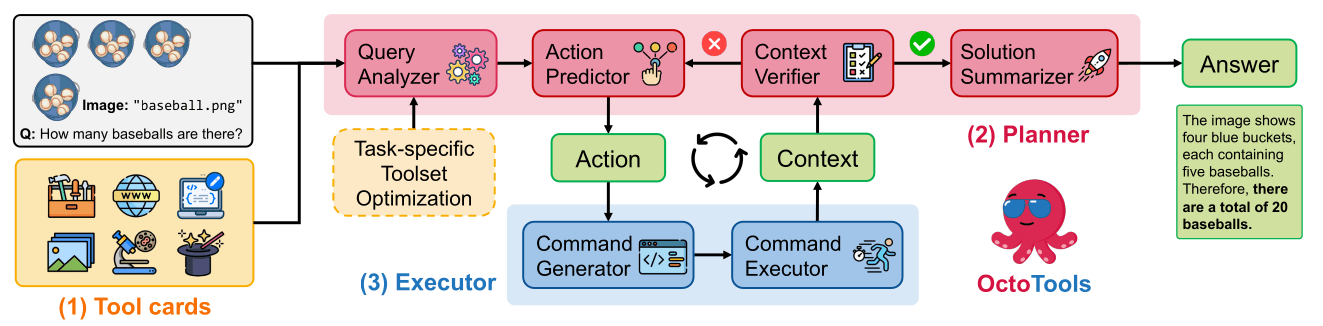
OctoTools 方法如上圖 Figure 1 所示,主要由 Tool Cards, Planner 與 Executor 組成。
在 Tool Cards 中會定義很多 Tool,以及每一個 Tool 的 Metadata。基於使用者的 Query,OctoTools 會經過以下步驟:
- Query Analyzer 分析哪些 Tool 適合現在的 Query,並且制定 High-Level Plan。這個 High-Level Plan 會用來當作 Trajectory 中的第一個元素
- Action Predictor 基於目前的 Trajectory 產生更具體的 Low-Level Plan,也就是下一個 Action,包含這個 Action 的目標是什麼,要使用什麼 Tool,以及要傳入什麼參數
- Command Generator 將由文字描述的 Action 轉為具體的 Python Code
- Command Executor 執行這段 Python Code 得到 Execution Result
- 將 {Action, Python Code, Execution Result} 這一個完整的 Step 存入整個 Trajectory
- 由 Context Verifier 基於整個 Trjectory 判斷是不是已經得到最終答案,給出 “CONTINUE” 或是 “STOP” 的信號
- “CONTINUE”: 回到第 2 步驟,此時 Action Predictor 已經可以根據新的 Trajectory 產生新的 Low-Level Action
- “STOP”: 進入到第 7 步驟
- 由 Solution Summarizer 基於整個 Trajectory 產生最終的答案
3.1 Tool Cards
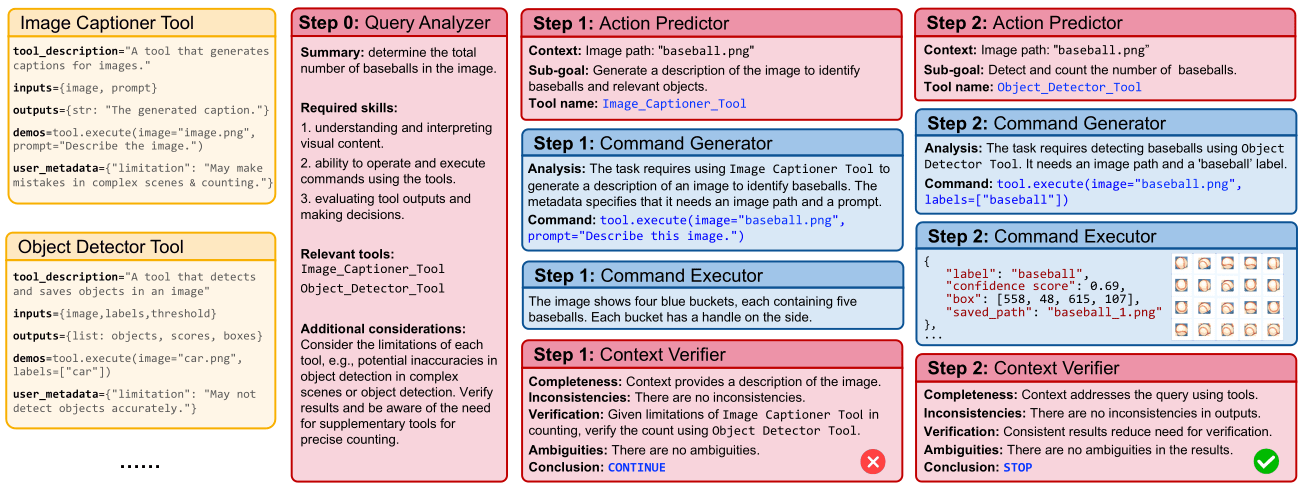
在 OctoTools 中的 Tool Cards 如上圖 Figure 3 所示,基本上有 Name, Description, Input, Output, Demonstrations 以及比較特的 “User Metadata”。 “User Metadata” 主要是 User 對這個 Tool 提供更多提示 (EX. 這個 Tool 有什麼限制, 這個 Tool 的 Best Practice 是什麼),讓 Planner 以及 Executor 更了解這個 Tool。
每個 Tool 都有實做兩個標準函式:
execute(): 基於傳入的參數執行 Toolget_metadata(): 取得 Tool 的 Metadata (讓 Planner 與 Executor 可以即時了解 Tool 的資訊)
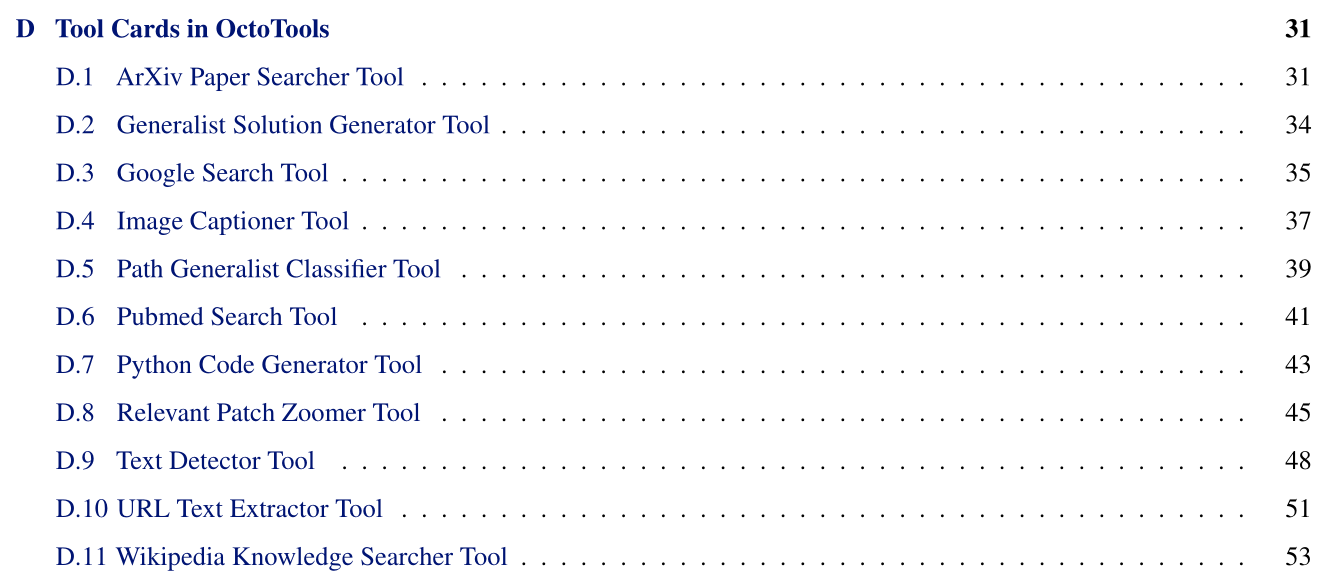
想進一步閱讀實際 Tool Cards 內容的讀者,可以參考論文中的 Appendix D:
3.2 Planner
Planner 實際上是由 4 個 LLM 所組成:Query Analyzer, Action Predictor, Context Verifier 以及 Solution Summarizer。
如上圖 Figure 3 所示,基於使用者的 Qeury 以及 Tool Set,Query Analyzer 的目標是產生一個 High-Level 的 Plan,包含 “Summary”, “Required Skills”, “Relevant Tools” 以及 “Additional Consideration”。 這個 High-Level Plan 是為了幫助整個 Reasoning 過程的大方向正確。
而 Action Predictor 則會根據 High-Level Plan 產生具體的 Low-Level Action,包含 “Sub-Goal” (這個 Action 的目標), “Tool Name” 以及 “Context” (要傳入到 Tool 的資訊)。
當 Executor 回傳執行結果後,Context Verifier 則會判斷根據使用者的 Query, 一開始的 High-Level Plan 以及目前的 Trajetory 來決定 Reasoning 過程是否要繼續。如果決定繼續,則會回到 Action Predictor 上,再根據目前的 Trajectory (除了有 High-Level Plan 也有前一次執行的 Action 以及 Result),產生新的 Low-Level Action。
如果 Context Verifier 決定結束,則會將完整的 Trajectory 交給 Solution Summairzer 產生最後的回答。
上述 4 個 LLM 的具體 Prompt,可以再參考論文中的 Appendix C:
3.3 Executor
Executor 相當單純的由 1 個 LLM 組成:Command Generator (Predictor)。
如上圖 Figure 3 所示,Command Generator 的任務就是將 Action Predictor 產生 Action 轉為更具體的 Python Code。這個 Python Code 就會再交給 Python Executor 執行並得到結果。
Command Generator (Predictor) 的 Prompt 也可以在論文中的 Appendix C 查閱。
3.4 Task-specific Toolset Optimization
假設目前 Tool Set 中已經有很多 Tool 了,在 Planner 的每個階段中,我們不希望把所有 Tool 的資訊都放到 LLM 的 Context 中,因為有些 Tool 可能根本完全不適用在目前的 Task 上,反而變成 Context 中的 Irrelevant Information。因此,假設一種 Task 有一些 Validation Task,那我們就可以透過 Validation Task 進行以下步驟,來建立一個 Optimized Tool Set:
- 建立一個 Base Tool Set,也就是先挑選出一些必要的 Tool
- 讓 Planner 以及 Executor 基於這個 Base Tool Set 來處理 Validation Task 得到一個 Base Score
- 從剩下的 Tool 中隨機挑選一個 Tool
- 建立一個 New Tool Set = Base Tool Set + New Selected Tool
- 讓 Planner 以及 Executor 基於這個 New Tool Set 來處理 Validation Task 得到一個 New Score
- 假設這個 New Score 大於 Base Score,則表示這個 New Selected Tool 是適合這種 Task 的
- 重複 Step 3 ~ Step 6,直到測試過每一種 Tool
- 建立一個 Optimized Tool Set = Base Tool Set + 所有適合這種 Task 的 Tool
4 OctoTools 實驗結果
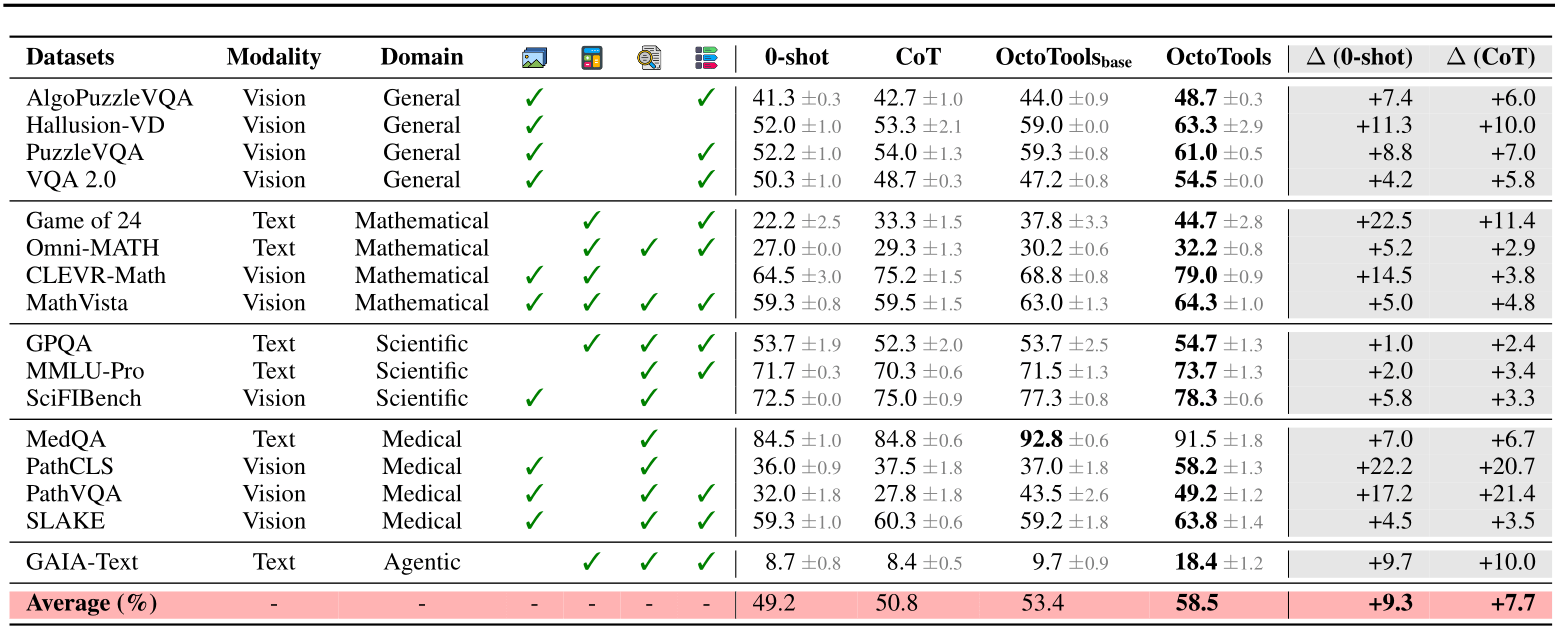
如上表所示,在實驗中作者使用 18 種 Benchmark,包含 Text 以及 Image Modality,橫跨 5 個 Domain。綠色勾勾的部份代表這個 Benchmark 所需要的技能,由左至右分是:Visual Understadning, Numerical Calculation, Knowledge Retrieval 以及 Multi-Step Reasoning。OctoToolsbase 代表只有使用 Base Tool Set,OctoTools 則是使用 Optimized Tool Set。
由上表可以發現到 OctoTools 方法在使用 Base 或 Optimized Tool Set 的情況下,都表現的比 Baseline 方法更好。說明 Agentic Framework 方法更適合處理負責的任務。
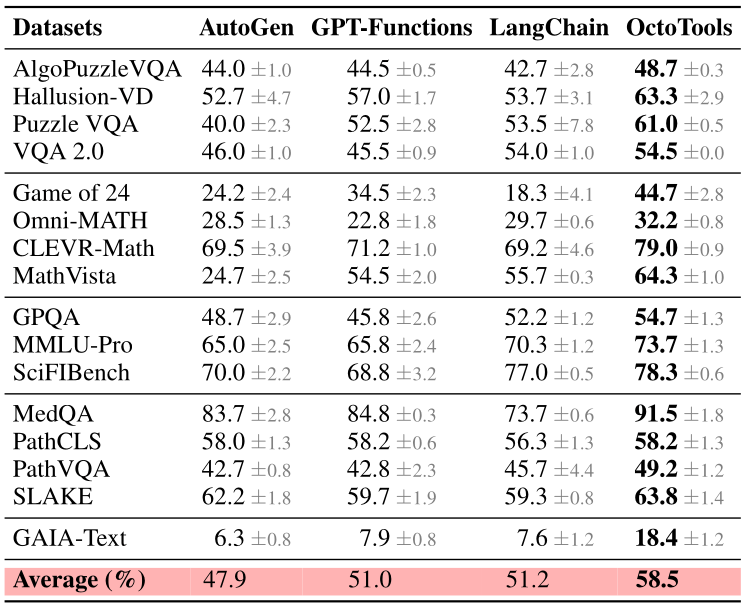
上表呈現的是將 OctoTools 與其他 Agentic Framework 方法比較。雖然可以發現 OctoTools 確實也比其他方法有更好的表現,但是作者並沒有交待清楚透過其他的 Agentic Framwork 是建立出什麼樣的 Agentic Workflow 來互相比較的。
5 結語
本篇文章介紹 OctoTools: An Agentic Framework with Extensible Tools for Complex Reasoning 論文。OctoTools 是一個 Training-Free 且 Open-Sourced 的 Agentic Framework,透過 Tool Cards, Planner 以及 Executor 之間精細設計,來提昇 LLM 的 Task Planning 與 Tool Usage 能力。透過實驗結果也可以看到 OctoTools 比其他的 Agentic Framework (EX. AutoGen, GPT-Functions, LangChain) 有更好的表現。