不微調、不靠 GPT-4!微軟 rStar 如何透過 MCTS 讓 LLaMA2-7B 數學能力暴增 5 倍? (ICLR 2025)

1 前言
本篇文章要和大家分享的是 Microsoft Research Asia 與 Harvard University 合作的精彩論文: Mutual Reasoning Makes Smaller LLM Stronger Problem-Solvers (rStar)。這篇論文於 2024 年 8 月發表,並已成功收錄為 ICLR 2025 Poster!
在 LLM 的發展歷程中,我們常認為要提升小參數模型 (SLMs,e.g. LLaMA2-7B) 的推理能力,必須依賴強大模型 (如 GPT-4) 的數據蒸餾來進行微調 (SFT)。但這篇論文提出了一個顛覆性的觀點: 小模型其實已經具備足夠的潛力,只是缺乏正確的「思考引導」與「自我驗證」機制。
作者提出了一種名為 rStar 的架構,結合了 MCTS (蒙地卡羅樹搜索) 與獨特的 Mutual Reasoning 機制。令人驚豔的是,在完全不需要微調、也不依賴 GPT-4 的情況下,僅透過推論階段的算法增強,就能讓 LLaMA2-7B 在 GSM8K 數學數據集上的準確率從 12.51% 暴增至 63.91%,甚至讓 Mistral-7B 超越了許多經過專門微調的模型。
接下來,我們將深入剖析 rStar 是如何透過模仿人類的思維動作 (Action Space) 以及像同學般的互相檢查 (Discriminator),解鎖小模型的深層推理能力。
2 rStar 想解決的問題
以大方向來說:
如何讓小模型 (SLMs) 在不依賴更強大模型 (如 GPT-4) 蒸餾數據的情況下,顯著提升自身的推理能力。
我們可以將 rStar 想解決的問題歸納為以下三個層次:
2.1 宏觀挑戰: 小模型的推理能力瓶頸與對「老師」的依賴
- 現狀: 小參數語言模型 (SLMs,例如 Mistral-7B, LLaMA2-7B) 在複雜推理任務 (如 GSM8K 數學題) 上的表現遠不如大模型。即使使用了 Chain-of-Thought (CoT),準確率依然有限 (例如 Mistral-7B 只有 36.5%) 。
- 問題: 目前提升 SLM 推理能力的主流方法是 Fine-tuning (微調),但這通常需要依賴「更強大的模型」 (如 GPT-4) 來生成高質量的合成數據或進行知識蒸餾。
- 目標: 論文希望打破這種依賴,實現 “Reasoning improvements without a superior teacher LLM”,即讓模型在 推理階段 (Inference-time) 通過自我博弈 (Self-play) 來提升能力,而不需要額外的訓練或外部監督。
2.2 技術挑戰 I: 生成階段的「無效探索」 (Ineffective Exploration)
當模型嘗試自我改進 (例如使用 RAP 等方法進行樹搜索) 時,面臨以下困難:
- 搜索空間陷阱: SLM 的能力有限,如果只是簡單地讓它「生成下一步」,它往往會在低質量的推理空間中打轉。論文中提到,即便讓 LLaMA2-7B 用 RAP 方法探索 32 輪,只有 24% 的軌跡是正確的。
- 動作空間 (Action Space) 單一: 傳統的 MCTS (蒙地卡羅樹搜索) 應用在 LLM 上時,動作通常很單一 (例如「提出下一個子問題」) 。這限制了模型模擬人類多樣化推理思維的能力 (如拆解問題、重新表述問題、一步推理 vs 多步推理等) 。
2.3 技術挑戰 II: 驗證階段的「盲目自信」 (Unreliable Verification)
即便模型生成了多條推理路徑,如何從中選出正確的那一條也是個大問題:
- 自我驗證的困難: 研究表明,SLM 很難準確評估自己生成的答案是否正確 (Self-verification is hard)。模型往往無法區分高質量和低質量的推理步驟。
- 多數決的局限: 傳統的 Self-Consistency (SC) 依賴「多數決 (Majority Voting) 」,這假設模型大部分時候是對的。但在難題上,SLM 可能大部分生成的答案都是錯的,導致多數決失效。
- 獎勵模型的成本: 如果要訓練一個專門的 Reward Model (RM),又回到了需要標註數據或外部監督的問題,且容易 Overfitting (過擬合) 特定任務。
總結來說:
這篇論文要解決的核心痛點是:
小模型在「生成」時想不到好思路,在「檢查」時又分不清對錯。
rStar 試圖通過改進 MCTS 的動作空間 (讓生成更像人) 以及引入「互助推理」(Mutual Reasoning,讓另一個同級模型來驗證) 來解決這兩個問題。
3 rStar 所提出的方法
這篇論文提出的 rStar 方法可以用這句話來總結:
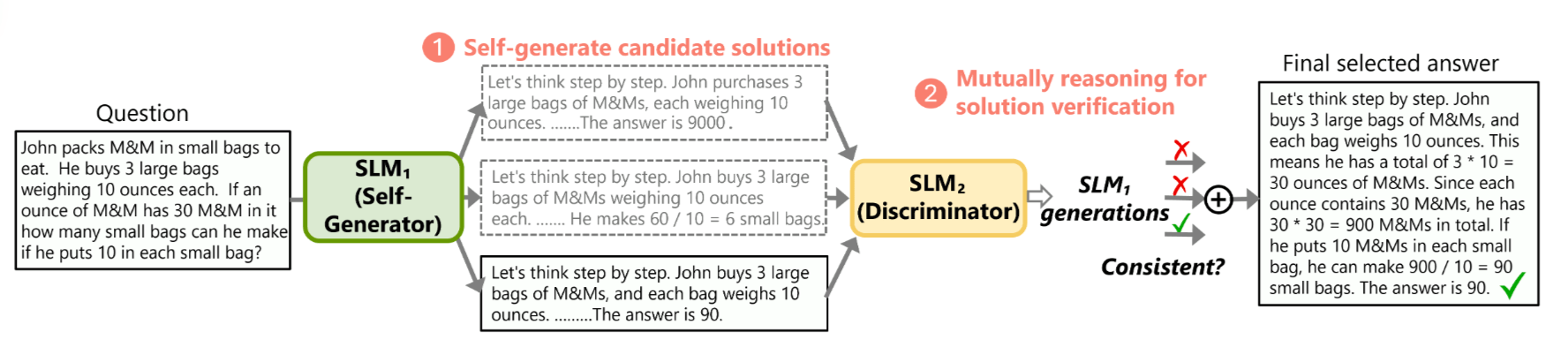
rStar 就像是讓小模型「分飾兩角」,一個角色 (稱之為 Generator) 利用模仿人類的多樣化思考策略 (如拆解問題、換句話說) 來生成解題路徑,另一個角色 (稱之為 Discriminator) 則像同學一樣通過「填空測試」來檢查這些路徑是否合理,兩者通過互相驗證 (Self-play) 在不重新訓練的情況下大幅提升推理準確率。
理解 MCTS (蒙地卡羅樹搜索) 是讀懂這篇論文技術細節的關鍵。rStar 的核心骨架就是建立在 MCTS 之上的。因此,我們會先從 MCTS 的基本概念談起,再接著說明 rStar 如何針對 MCTS 的每個階段設計方法。
3.1 MCTS 的基本概念 (四個階段)
MCTS 是一種啟發式 (Heuristic) 的搜索算法,最早在圍棋 (Go) 等博弈遊戲中大放異彩 (比如 AlphaGo)。它的核心思想是:
因為可能的路徑太多了,我不可能全部算完,所以我透過「隨機模擬」來統計勝率,把計算資源集中在「最有希望」的路徑上。
在 rStar 這篇論文中,MCTS 被用來幫助 Generator 生成推理步驟。一棵樹的根節點 (Root) 是問題,節點 (Node) 是中間的推理步驟,邊 (Edge) 是採取了某種動作 (Action) 。
MCTS 的一次迭代 (Iteration) 包含以下四個標準階段:
選擇 (Selection):
- 做什麼: 從根節點出發,沿著樹往下走,直到走到一個「還沒完全展開」的節點 (Leaf node)。
- 怎麼選: 這一步不是隨機的,而是根據一個公式 (通常是 UCT, Upper Confidence Bound for Trees)。這個公式在平衡兩件事:
- Exploitation: 走那條目前看起來分數最高、勝率最大的路。
- Exploration: 走那條很少被走過的路,因為那邊可能藏著更好的答案。
- 意義: 確保我們既關注當前最好的解,又不放棄探索未知的可能性。
擴展 (Expansion):
- 做什麼: 當「選擇」走到一個葉節點後,如果這個節點還能繼續往下推導,我們就創建一個或多個新的子節點 (Child Node)。
- 意義: 在 rStar 中,這代表模型根據當前的推理狀態,採取了一個新的推理動作 (比如拆解問題、生成下一步),長出了新的推理步驟。
模擬 (Simulation / Rollout):
- 做什麼: 從剛剛擴展出的新節點開始,快速地往後走到底,直到遊戲結束或生成完整答案。這通常使用比較簡單或隨機的策略 (Default Policy) 。
- 意義: 這就像是「試跑」。因為只生成了一半的推理步驟不知道對錯,我們乾脆讓模型快速把剩餘步驟寫完,看看最後能不能得出一個合理的答案。
反向傳播 (Backpropagation):
- 做什麼: 根據「模擬」的結果 (比如最終答案是否通過了某種檢查,或者得到的 Reward 分數) ,將這個分數一路回傳給路徑上經過的所有父節點。
- 意義: 更新這條路徑上所有節點的統計數據 (訪問次數 和 價值 ) 。如果這次模擬成功了,這條路徑上的節點分數就會變高,下次「選擇」階段就更容易被選中。
DFS 和 BFS 本質上是窮舉 (Exhaustive) ,而 MCTS 是採樣 (Sampling/Non-exhaustive)
BFS (廣度優先搜索) & DFS (深度優先搜索):
- 它們是盲目的。BFS 一定要把這一層的所有可能性都看完才去下一層;DFS 一定要撞到南牆才回頭。
- 它們不具備「學習」能力。它們不會因為某條路徑看起來很爛就提早放棄,也不會因為某條路徑很好就多分配資源去深挖。
- 缺點: 當問題很複雜 (如數學推理,每一步都有無數種說法) 時,搜索空間呈指數級爆炸,窮舉法很快就會耗盡內存或時間,且往往只能搜索很淺的層次。
MCTS (蒙地卡羅樹搜索):
- 它是不對稱的。這棵樹在生長時,長得並不整齊。「好」的分支會長得很深、很茂盛,「壞」的分支可能剛長出來就被冷落了。
- 非窮舉: 它不需要遍歷所有節點。它通過多次模擬,統計出哪條路徑「機率上」最好。
- 動態調整: 隨著迭代次數增加,它對樹的形狀認識越清晰,搜索策略會越來越聰明。
3.2 rStar 中的 “Selection” 流程
rStar 並沒有特別針對 Selection 做特別的設計,主要遵循原來的 MCTS 作法:
- 從根節點出發: 從題目 (Root) 開始。
- 面對分岔路: 假設當前節點已經擴展過 (Expanded),有生成好幾個候選的 Child Node ()。
- 打分數: 對每一個候選的 Child Node 計算 UCT 分數。
- 挑選: 選擇 UCT 分數最高的那個 Child Node,移動過去。
- 重複: 在新的 Node 繼續重複步驟 2-4,直到遇到一個「葉節點」(Leaf Node),也就是一個還沒有生成過後續步驟的節點。
一旦到達葉節點,Selection 階段結束,接下來就會進入 Expansion (擴展) 階段。
3.2.1 UCT (Upper Confidence Bounds for Trees)
在 Selection 階段中,UCT (Upper Confidence Bounds for Trees) 分數該怎麼計算? 我們直接來看論文第 3.2 節 (Solution Generation with MCTS Rollout) 中的公式:
這個公式決定了 MCTS 在 Selection (選擇) 階段,面對多個可能的下一步 (Child Node) 時,該挑哪一個往下走。它由兩部分組成: 利用 (Exploitation) 和 探索 (Exploration)。
3.2.1.1 第一項: 利用 (Exploitation) —— 挑選「績優股」
含義: 這是節點 的平均勝率 (平均獎勵)。
: 該節點累積的總分。
Q(s, a) 的意義所以 的準確含義是:
「這個特定的推理步驟 (它是通過動作 生成的) 所累積的總獎勵值。」
- 場景模擬: 假設你現在在「第 1 步」,你正在考慮要不要選「第 2 步 (方案A)」。
- 這裡的 就是「第 2 步 (方案A)」。
- 就是產生方案 A 的那個動作 (例如「提出一個子問題」)。
- 就是歷史上我們經過這個節點 後,最終判定它對解題有幫助的總得分。
: 該節點被訪問過的次數。
直觀理解: 如果這個推理步驟我們之前走過 10 次,其中 9 次都導向了正確答案,那它的平均分數就會很高。這一項鼓勵模型去走那些過去經驗證明是好路的方向。
3.2.1.2 第二項: 探索 (Exploration) —— 給「潛力股」機會
- 含義: 這是給少走的路加分 (探索紅利)。
- : 父節點 (當前所在的節點) 被訪問的總次數。
- : 子節點 (我們正在評估的候選人)被訪問的次數。
- 數學機制:
- 分母是 : 如果這個節點 我們已經走過很多次了,分母變大,這一項的值就會變小 (探索紅利降低)。
- 分子是 : 隨著我們經過父節點的次數越來越多,如果某個子節點 的訪問次數 一直沒增加(還是 0 或很小),這個數值就會變得很大。
- (Constant): 這是一個超參數 (常數),用來調節探索的權重。 越大,模型越喜歡嘗試新鮮的路徑。
- 直觀理解: 這一項在說: 「嘿!雖然旁邊那條路 (節點 ) 目前的平均分可能不是最高,或者是 0,但那是因為我們還沒怎麼走過它!給它一點機會試試看嘛!」
3.3 rStar 中的 “Expansion” 流程
這正是這篇論文最精彩的創新點之一!傳統的 MCTS 往往只會用一種方式來「擴展」(比如: 永遠只問「下一步是什麼?」) ,但 rStar 觀察到人類在解難題時,思維方式是非常靈活多變的。
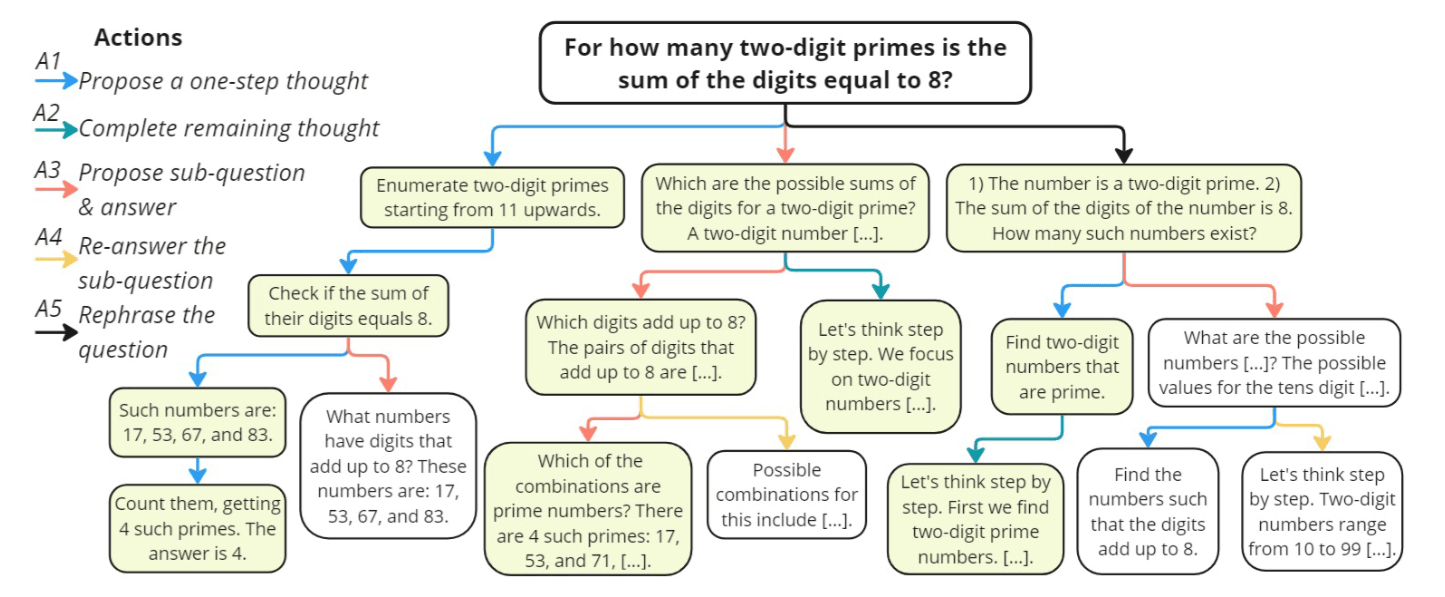
在 Expansion (擴展) 階段,當 MCTS 走到一個葉節點 (目前的推理狀態) 時,它會從 5 種模仿人類推理的 Action 中選擇一種來執行,生成新的子節點 (新的推理內容)。
我將這 5 個 Action 分為三大類: Linear Reasoning、Decomposition & Refinement、Reformulation。
3.3.1 第一類: Linear Reasoning
這類動作最像標準的 Chain-of-Thought (CoT),適合處理邏輯比較順暢的部分。
3.3.1.1 Action 1 (): Propose a one-step thought
- 做什麼: 根據當前的上下文,只生成「這一步」的推理,而不急著把後面全寫完。
- 為什麼: 這是為了避免 CoT 的「滾雪球錯誤」。標準 CoT 是一口氣寫完,如果中間錯了後面全錯。
- MCTS 視角: 擴展出一個只包含「下一句話」的子節點。
3.3.1.2 Action 2 (): Propose the remaining thought steps
- 做什麼: 根據當前狀態,一口氣把剩下的推理步驟全部寫完,直到得出答案。
- 為什麼: 這是為了模擬人類的「快思考」。如果剩下的問題已經變得很簡單了,或者模型很有把握,就不需要一步一步拖泥帶水,直接衝向終點效率更高。
- MCTS 視角: 擴展出一個包含完整後續路徑的子節點 (通常這會直接通向終止節點)。
3.3.2 第二類: Decomposition & Refinement
這類動作專門用來對付複雜、容易出錯的難題,靈感來自 “Least-to-Most Prompting”。
3.3.2.1 Action 3 (): Propose next sub-question along with its answer
- 做什麼: 模型不直接解原題,而是問自己: 「為了解決這個大問題,我現在需要先解決哪個小問題?」然後回答這個小問題。
- 為什麼: 複雜問題 (如多步數學題) 直接解容易錯。拆解成小問題 (Sub-questions) 可以降低難度。
- MCTS 視角: 擴展出的節點包含一個「Q: 小問題… A: 小答案…」的結構。
3.3.2.2 Action 4 (): Answer the sub-question again
- 限制: 這個動作只能接在 後面使用。
- 做什麼: 針對 剛剛提出來的那個子問題,再回答一次。但這次會強制模型使用 Few-shot CoT (思維鏈) 的方式來詳細回答。
- 為什麼: 有時候 雖然拆解出了對的問題,但回答得太草率或錯了。 就像是一個「檢查機制」或「更認真的解題模式」,確保這個關鍵的子步驟是算對的。
- MCTS 視角: 這是對上一個節點的修正或強化。
3.3.3 第三類: Reformulation
這類動作是為了解決「審題不清」或「鑽牛角尖」的問題。
3.3.3.1 Action 5 (): Rephrase the question/sub-question
- 限制: 通常在根節點 (原問題) 或子問題後使用。
- 做什麼: 把題目中的條件重新列點 (List conditions) ,或者換句話說,把題目變得更清晰。
- 為什麼: 很多時候模型做錯是因為忽略了題目中的某個隱藏條件 (比如「正整數」、「不包含」等) 。這個動作模擬人類在卡住時會說: 「等等,讓我重新讀一遍題目,把已知條件列出來…」。
- MCTS 視角: 擴展出的節點不是推理步驟,而是一個「更清晰的題目描述」,後續的推理將基於這個新描述進行。
3.3.4 每次該選擇哪一種 Action?
在像 AlphaGo 這樣的高階系統中,通常會有一個 Policy Network (策略網路) 來預測每個動作的機率 (Prior Probability)。
但在 rStar 這篇論文中,為了保持輕量化並適用於各種 SLM,它並沒有訓練額外的策略網路 (Policy Network) 來決定要選哪一個 Action。相反地,它採用的是「規則限制 (Rule-based Constraints)」搭配 「探索優先 (Exploration First)」的機制。我們可以把它想像成一個帶有規則的清單。
具體來說,決定 Expansion 動作的邏輯分為兩層:
3.3.4.1 第一層過濾: Hard Constraints
並不是這 5 個 Action 在任何時候都能用,必須符合當前的「上下文邏輯」。論文中明確定義了依賴關係 (Dependencies) :
- (Answer sub-question again): 只能在 (Propose sub-question) 之後使用。
- 邏輯: 你必須先有一個子問題,才能「重新回答」它。
- (Rephrase): 只能在 Root (原始問題) 之後使用 (或者在某些設定下接在子問題後,但主要是針對題目) 。
- 邏輯: 通常是題目讀不懂或條件複雜時才需要重述。
- : 這些是比較通用的動作,在大多數推理的中間狀態 (Intermediate States) 都是可用的。
3.3.4.2 第二層決策: UCT 的「未探索優先」機制
這回到了 MCTS 的核心特性。當 Selection 階段選到了一個節點,準備進行 Expansion 時:
- 初始狀態: 所有還沒被嘗試過的 Action (合法的那些) ,它們的訪問次數 都是 0。
- 數學結果: 根據 UCT 公式,分母為 0 (或極小) ,這會導致計算出來的數值無限大。
- 決策: MCTS 會強制模型去嘗試那些「還沒試過」的 Action 類型。
換句話說,rStar 採取的策略是「雨露均霑」: 它不會預判哪個動作好,而是傾向於把所有合法的動作類型都試一遍。如果這個節點還沒試過 ,就做 ;下次再來如果 做過了,就試試 。
3.3.4.3 補充: 數量限制 (Quota)
為了防止搜索樹無限變寬,論文在 4.1 節 (Implementation Details) 提到了一個很重要的限制:
- (單步) & (子問題): 這兩種動作變化多,允許在同一個節點下最多生成 5 個不同的子節點 (透過採樣不同的內容) 。
- 其他動作 (): 默認限制為 1 個。
假設目前站在 Root Node 上,且目前 Root Node 已經有 2 個 Child Node,分別是透過 A2 和 A5 這 2 種 Action 所建立的 Child Node。根據數量限制 (Quota),Root Node 已經不能再透過 A2 和 A5 這 2 種 Action 來建立新的 Child Node,且根據 Hard Constraint 目前也不可以使用 A4 Action,因此目前可以使用的 Action 僅剩下 A1 和 A3。
根據 MCTS 的概念,會優先使用還沒使用過的 Action,因此會直接嘗試 A1 或 A3,而不是直接走進 A2 和 A5 的 Child Node。此外,因為 A1 和 A3 的 Quota 都分別是 5 個,因此每次在 Root Node 進行 Expansion 時候,其實都會選擇 A1 或 A3 Action,到最後 Root Node 下就會有 5 (A1) + 5 (A3) + 1 (A2) + 1 (A5) = 12 個 Child Node。
3.3.4.4 總結
所以在 Expansion 階段,決定 Action 的流程是:
- 列出清單: 根據目前節點的狀態,列出所有合法的 Action 類型 (剔除不符合邏輯順序的) 。
- 檢查額度: 檢查哪些 Action 類型還沒達到生成數量上限。
- 隨機/輪詢選擇: 從剩下的合法選項中挑一個 (通常是隨機或依序) ,讓 LLM 去執行生成。
結論: rStar 並不依賴模型去「判斷」當下該用什麼招式最好,而是利用 MCTS 的特性,強迫模型在多次 Rollout 中嘗試各種不同的招式,最後再由 Reward (獎勵機制) 來告訴模型哪一招最有效。
3.4 rStar 中的 “Simulation” 流程
假設現在站在 Child Node (稱之為 ) 上。這個節點是剛剛透過 Action (Propose a one-step thought) 生成的,所以它目前只包含「第一步」的推理內容 (例如:「Step 1: 先計算原本有多少顆蘋果…」),還沒有最終答案。
如果我們停在這裡,根本不知道這一步寫得好不好。Simulation (又稱 Rollout) 的目的,就是透過「快速預演未來」,來評估這個節點 () 究竟能不能通往正確的結局。
以下是 rStar 論文中 Simulation 階段的詳細步驟:
3.4.1 Default Policy Rollout
在這個階段,MCTS 會切換成一個比較簡單、快速的模式 (Default Policy)。
- 輸入: 題目 + 目前節點 的內容。
- 指令: 告訴 LLM:「請根據已經寫好的 Step 1,把剩下的推理步驟全部補完,直到算出答案。」
- 動作: 這時候通常不使用那些複雜的 動作,而是類似於 Action (Propose remaining steps) 的邏輯,讓模型一口氣生成到底。
3.4.2 Terminal State
LLM 執行完上述指令後,會生成一條完整的軌跡 (Full Trajectory):
這時候我們拿到了一個最終答案 (例如:「答案是 42」)。
3.4.3 Reward Calculation —— 關鍵的評分標準
現在我們手上有了最終答案,要怎麼給 打分 (計算 值) 呢?
這篇論文遇到了一個大挑戰: 這是推理任務 (Inference),沒有標準答案 (Ground Truth) 可以對照。 因此,rStar 採用的方法是 Self-Consistency Majority Voting Estimation。
在論文的 4.1 Experiment Setup 中的 Implementation Details 中,有提到 “In the trajectory self-generation stage, we augment each target SLM with our MCTS, performing 32 rollouts.” 這裡的意思是 MCTS 的 4 階段流程 (Selection -> Expansion -> Simulation -> Backpropagation) 會進行 32 次,每次都會得到一個完整的軌跡 (Full Trajectory) 以及最終答案,因此總共會得到 32 個完整的軌跡 (Full Trajectory) 以及最終答案。
因此,在 rStar 中會將每次 Simulation 得到的最終答案與 MCTS 目前答案池中的答案 (最多 32 個) 進行比較來計算 Reward:
- Answer Pool: 在整棵 MCTS 樹的搜索過程中,我們會生成很多條路徑,得到很多個答案。
- Self-Consistency Majority Voting: 我們會看哪個答案出現最多次。假設「42」在所有嘗試中出現頻率最高,我們就暫時認為「42」是正確答案。
- Reward:
- 如果這次 Simulation 算出來的答案是「42」(和主流意見一致),這次模擬就得到 高分 (Reward = 1)。
- 如果算出來是「15」(非主流意見),就得到 低分 (Reward = 0)。
假設我們目前站在某個節點上進行整個 MCTS 的第一次 Rollout (答案池中目前沒有任何 Answer),我得到 “18” 這個最終答案。我們會把 “18” 加入到答案池中。根據論文提到的 Self-Consistency Majority Voting,這次 Rollout 結果的 Reward 就會是 1 / 1 = 1.0,這個 Reward 就會在 MCTS 的下個階段 (Backpropagation) 更新回去給來到目前這個節點的每個父節點。
換言之,假設我們目前站在某個 Node 上進行整個 MCTS 的第 5 次 Rollout,答案池中已經有 4 個 Answer,分別是 [“18”, “18”, “18”, “20”]。如果這個第 5 次 Rollout 得到的答案為 “20”,根據論文提到的 Self-Consistency Majority Voting,這次的 Reward 就會是 2/5 = 0.4,這個 Reward 就會在 MCTS 的下個階段 (Backpropagation) 更新回去給來到目前這個節點的每個父節點。
在 MCTS 的初期 (剛開始跑前幾輪),答案池還很小,這個評分可能不太準。但隨著 Rollout 次數增加 (論文設定是 32 輪),「正確答案」通常會因機率優勢而浮現,評分就會越來越準。
3.5 rStar 中的 “Backpropagation” 流程
如果說 Selection 是「決策」,Expansion 是「行動」,Simulation 是「評估」,那麼 Backpropagation 就是 「學習與歸納」。這是 MCTS 真正變聰明的關鍵時刻。
在 rStar 這篇論文中,Backpropagation 的實作非常直觀,但有一個為了適應 SLM (小模型) 而做的關鍵設計選擇。
我將其拆解為三個部分來說明:
3.5.1 核心任務: 更新什麼?
當 Simulation 結束,我們得到了一個 Reward (記為 )。現在,我們要沿著剛剛走過來的路徑 (從當前的 Leaf Node 一路回到 Root Node),更新路徑上每一個節點的兩個統計數據:
- (訪問次數 Visited Count):
- 告訴這個節點:「嘿,我們又經過你一次了!」
- 更新方式:
- (累積價值 Total Reward Value):
- 告訴這個節點:「這次經過你之後,我們拿到了一個 分的結果,把它記在帳上!」
- 更新方式:
3.5.2 rStar 的關鍵設計: 只看結果,不問過程 (Outcome-based Reward)
這是這篇論文的一個重點。許多進階的 MCTS 方法 (例如 AlphaGo) 或者其他的 Reasoning 方法 (如 RAP),會試圖給中間的每一個步驟打分 (Intermediate Reward)。
但在 rStar 中,作者特意避開了給中間步驟打分。
- 為什麼? 因為 SLM 能力較弱,讓它自己評估「這一步推理好不好」(Self-rewarding) 通常評不準,甚至跟隨機猜差不多 (論文 Appendix 有證明這一點)。
- 怎麼做? rStar 採用 Sparse Reward (稀疏獎勵) 的策略。
- 中間節點本身的「內在價值」設為 0。
- 它們的價值完全取決於最終 Simulation 跑出來的那個結果。
具體操作流程:
假設我們這次生成的路徑是: Root (題目) Node A (第一步) Node B (第二步) [Simulation] 最終答案
假設 Simulation 根據多數決給出的 Reward 。
Backpropagation 更新過程:
- 更新 Node B:
- 更新 Node A:
- 更新 Root:
意義: 這意味著 Node A 和 Node B 對於這個「好結果」有同等的功勞。這是一種簡化但有效的歸因方式 (Credit Assignment)。
3.5.3 與 UCT 公式的連動
這一步更新完畢後,整棵樹的數據就變了。
- 因為 變大了,這條路徑上的節點在下一次 Selection 階段的 Exploration (探索項) 數值會變小(分母變大)。
- 因為 變大了(假設 是正的),這條路徑的 Exploitation (利用項,即平均勝率 ) 可能會變高。
這就形成了一個閉環:
- 如果這次結果好 () 大幅增加 平均分提高 下次更容易被選中 (Exploitation)。
- 如果這次結果差 () 不變但 增加 平均分被拉低 下次可能會嘗試別的路 (Exploration)。
3.6 rStar 中的 Mutual Reasoning for Final Answer
做完了 32 次 Rollout (Selection -> Expansion -> Simulation -> Backpropagation),我們目前得到了 32 個完整的軌跡 (Full Trajectory) 以及最終答案。接下來的問題是: 怎麼決定最終答案?
所以,rStar 引入了第二階段:Mutual Reasoning 與 Discriminator。這 32 條 Trajectory 會經過一個「嚴格的過濾與驗證」流程,具體步驟如下:
3.6.1 Discriminator
- 是誰? 另一個能力相當的小模型 (SLM),或者甚至是同一個模型扮演不同角色。
- 任務: 它的工作不是直接給這 32 條路徑打分 (比如「這題給 80 分」),因為小模型通常評分不準。
- 方法: 它的工作是 「填空測試」。
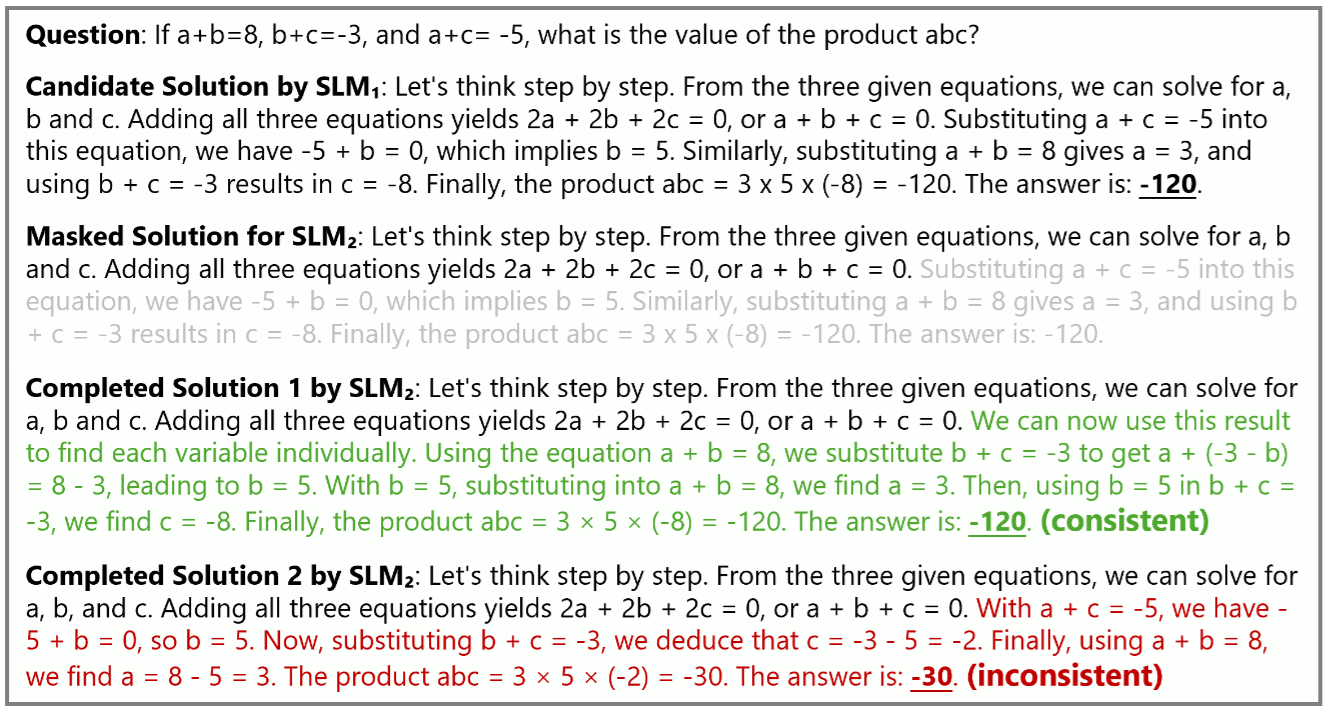
3.6.2 Mask-and-Complete
對於這 32 條 Trajectory 中的每一條(我們稱之為 ),系統會進行以下操作:
Masking:
- 假設某一條 Trajectory 總共有 5 個步驟 ()。
- 系統會隨機選一個切割點 (論文提到是隨機保留前 20% 到 80% 的步驟)。
- 比如保留前 3 步 (),把後面的 () 遮住 (Mask 掉)。
Completion:
- 把題目和保留的前半段 () 丟給 Discriminator。
- 指令:「請根據前面的步驟,把剩下的推理步驟補完,並算出答案。」
- Discriminator 會生成一個新的結尾和新的答案(記為 )。
3.6.3 Mutual Consistency Check
現在我們有兩個答案:
- 原版答案 (): 來自 Generator 生成的那條完整 Trajectory。
- 重寫版答案 (): 來自 Discriminator 根據前半段補完的結果。
判斷標準:
- 如果 : 恭喜!這條路徑被視為 Mutually Consistent。這代表這條路徑的邏輯很穩健,連另一個模型看到一半都能推導出同樣的結果。這條路徑的可信度大大提升。
- 如果 : 警報!這條路徑可能存在邏輯跳躍或運氣成分,導致另一個模型接不下去或接出了不同的結果。
3.6.4 Final Selection
透過 Mutual Reasoning 與 Discriminator,我們可以把 Generator 產生的 32 條 Trajectory 進行篩選。基於剩下的 Trajectory,我們要挑出唯一的「王者」作為最終回答。
我們會透過以下公式計算剩下的 Trajectory 的分數,然後挑選出分數最高的作為最終答案:
3.6.4.1 MCTS Reward
- 來源: 這是來自 MCTS 搜索樹 (Generator) 的數據。
- 具體指什麼: 指的是該條 Trajectory 對應的終端節點(Terminal Node)在 MCTS 中的 值(或者說是經過標準化後的 值)。
- 代表意義: 「這條特定的推理路徑(Path)品質如何?」
- 在 MCTS 的過程中,如果這條路徑()被訪問過多次,且每次都能導向高分答案,它的 值就會很高。
- 這代表 Generator 認為:「按照這個步驟走,邏輯是很順暢、很穩的。」
3.6.4.2 Confidence Score
- 來源: 這是來自 32 次 Rollouts 的答案池 (Answer Pool) 的統計數據。
- 具體指什麼: 指的是這條路徑最終得出的「那個答案」,在所有 32 次嘗試中出現的頻率 (即 Self-Consistency Majority Voting 的機率)。
- 代表意義: 「這個最終答案 (Answer) 的可信度如何?」
- 這與路徑無關,只看結果。
- 例如:如果 32 次裡面有 28 次都算出 “42”,那 “42” 的 Confidence Score 就是 。
3.6.4.3 為什麼要相乘?
假設我們現在有兩條通過了 Discriminator 驗證的 Trajectory (稱為 A 和 B),它們都算出了正確答案 “42”。我們該選哪一條作為最終輸出的「詳解」?
Trajectory A:
- 是一條很常見、很穩健的路徑 (MCTS 經常走到這裡)。
- 值 (Reward) = 0.9 (路徑品質高)
- 答案 “42” 的 Confidence = 0.875 (答案很熱門)
- Final Score =
Trajectory B:
- 是一條比較冷門的路徑 (MCTS 很少走到,或者偶爾會導致錯誤),但這次剛好算對了,也通過了 Discriminator 驗證。
- 值 (Reward) = 0.4 (路徑品質低,可能是賽到的)
- 答案 “42” 的 Confidence = 0.875 (答案依然很熱門)
- Final Score =
通過相乘,系統會傾向於選擇 「既能導出高共識答案 (Confidence 高),其推理過程本身也被 MCTS 驗證為高品質 (Reward 高)」 的那條 Trajectory。這避免了選到那種「雖然答案對了,但過程是歪打正著」的路徑,確保輸出給用戶的解題步驟是最標準、最穩健的。
4 rStar 的實驗結果
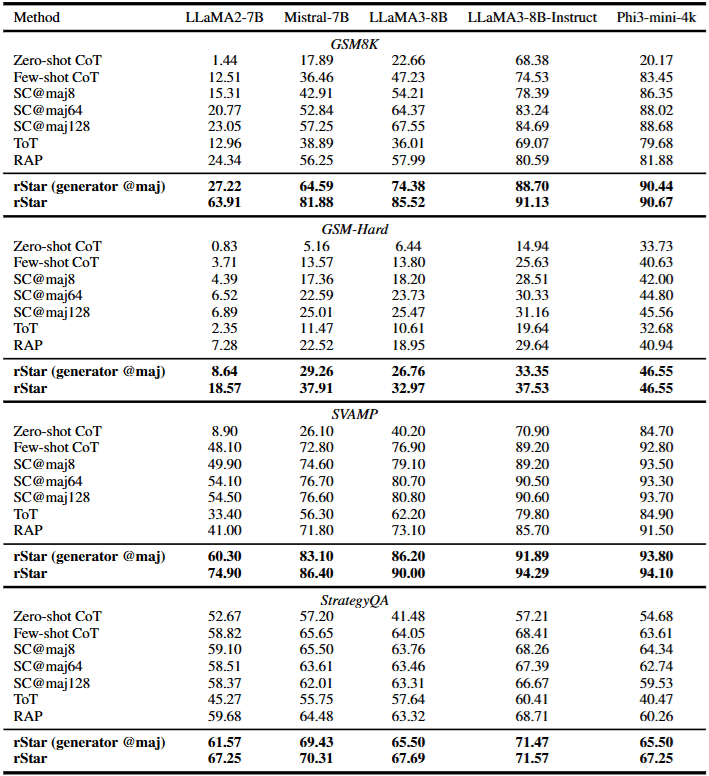
rStar (generator @maj) 表示單純根據 Generator 所進行的 32 次 Rollout,透過 Majority Voting 決定 Final Answer (完全沒有使使用到 Discriminator)。
從上表中可以發現到,即使在完全沒有使用 Discriminator 做 Mutual Reasoning 的情況下,rStar 的表現仍然比 Baseline 方法好,說明 rStar 中的所設計的 Generator 是有效的。如果加上 Discriminator 做 Mutual Reasoning,最終表現又會顯著提升。
在閱讀上表的實驗數據時,我產生了一個問題:
單純的 SC(Self-Consistency)@maj64 其實就達到很不錯的表現,如果 rStar 針對一個 Task 所需要的平均 LLM Call 遠高於 64 次,然後表現又沒有比 SC@maj64 提升更多的話,那這個方法是不是效益沒有那麼大?
實際上,論文在 Appendix A.2 的 Table 7 中非常誠實地列出了這個數據。
- 具體的 LLM Call 次數,根據論文數據 (以 GSM8K 為例):
- LLaMA2-7B: 平均需要 166.81 次 calls。
- Mistral-7B: 平均需要 148.90 次 calls。
這 ~150-160 次 LLM Call 是怎麼來的?
- Generator (MCTS): 為了生成 32 條完整的 Trajectories,MCTS 雖然只做 32 次 Rollout,但因為中間有 Expansion (生成 Action)和 Simulation (補完路徑),且樹的結構有分支,平均大約消耗 120-130 次 calls。
- Discriminator: 針對生成的 32 條路徑進行驗證,固定需要 32 次 calls。
- 總計: 次。
rStar 的成本大約是 SC@64 的 2.3 ~ 2.6 倍 (接近 SC@128 或 SC@192 的等級)。
除了 LLM Call 的次數,論文還提到了一個更驚人的數字:Generated Tokens。
- rStar 平均每題會生成 36 萬 (367.1k) 個 Tokens。
- 這是因為 MCTS 的每一條路徑往往都很長 (包含多步推理、子問題拆解),加上 Discriminator 也要讀很長的 Context。
相比之下,SC@64 如果每條路徑 200 tokens,總共也才 1.28 萬 tokens。rStar 的 Token 成本大約是 SC@64 的 20~30 倍。
但是,我們必須看 「投資報酬率 (ROI)」,也就是增加這些成本換來了多少準確率提升。這取決於模型的基礎能力。
- 情境 A:弱模型 (Weak SLMs) —— rStar 完勝 (以 LLaMA2-7B 為例 (看 Table 2)):
- SC@64: 準確率 20.77%
- SC@128: 準確率 23.05% (即使加倍到 128 次,提升也非常微弱)
- rStar (~160 calls): 準確率 63.91%
結論: 在這種情況下,rStar 的效益是巨大的。 為什麼?因為弱模型有嚴重的「系統性錯誤」。SC@64 只是讓它把錯誤的邏輯重複 64 次 (Garbage In, Garbage Out)。rStar 透過 MCTS 的 Action 引導,硬是把模型的能力邊界推了出去,解決了 SC 堆數量也解決不了的問題。這裡的成本增加是非常值得的。
- 情境 B:強模型 (Stronger SLMs) —— 差距縮小 (以 LLaMA3-8B-Instruct 為例)
- SC@64: 準確率 83.24%
- rStar: 準確率 91.13%
結論: 提升了約 8%。 這時候就要看應用場景了。如果你追求極致的準確率(從 83 分考到 91 分),這 2.5 倍的成本是可以接受的。但如果你資源有限,SC@64 已經夠好了。
rStar 方法與 Self-Concsistency 方法選擇的總結:
- 解決「不會做」的問題: rStar 真正的價值在於「雪中送炭」。當模型本身能力不足(如 LLaMA2-7B 面對數學題),SC 採樣再多次都沒用,這時 rStar 能讓模型「變聰明」,這是 SC 做不到的。
- 解決「粗心」的問題: 當模型已經很強(如 GPT-4 或 LLaMA3),只是偶爾粗心,SC (Self-Consistency) 的 CP 值通常更高。
- 結論: rStar 的效益在於挖掘 SLM 的潛力上限,而不是單純為了省錢。如果你的任務是 SLM 覺得很難的(準確率低於 50%),rStar 是非常強大的工具;如果任務對模型來說很簡單,用 SC 就夠了。

這是目前 AI 領域非常熱門的話題:Weak-to-Strong Generalization。 我們之前討論過 Discriminator(判別器)的角色。我們可能會直覺認為:「要檢查 LLaMA3-8B 的答案,判別器至少也要是同等級的吧?」
但在上表中,作者做了一個有趣的實驗:
- Generator: LLaMA3-8B-Instruct
- Discriminator: 換用不同等級的模型。
結果令人驚訝:
- 用 Phi-3-Mini (3.8B) 當判別器:準確率 91.13%
- 用 GPT-4 (超強模型) 當判別器:準確率 92.57%
解讀: 這說明了 rStar 的 Mutual Consistency 機制非常強大。即使是一個比 Generator 弱很多的 Discriminator (3.8B vs 8B),只要它能進行基本的邏輯補全,就能有效地篩選出正確答案。這對於降低部署成本來說是個巨大的好消息(你可以用一個小模型來監控大模型)。
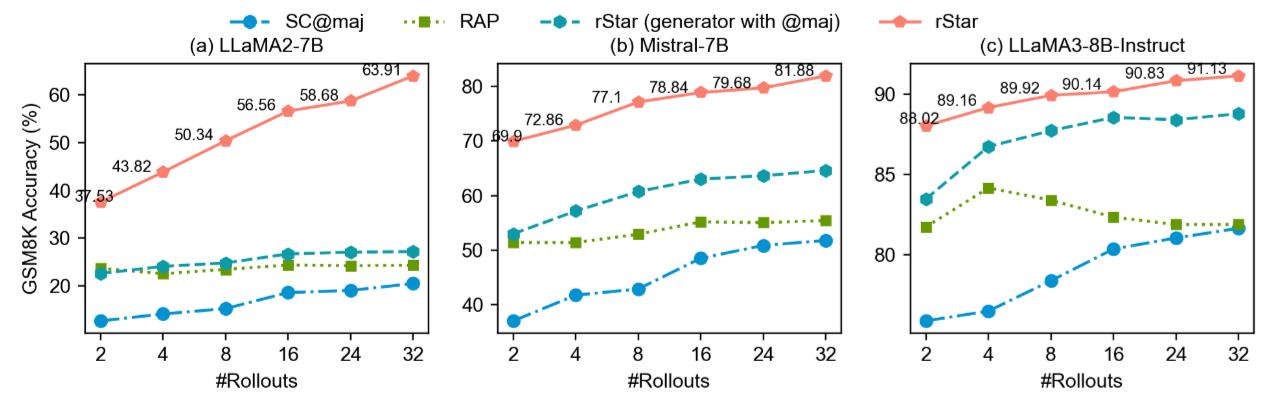
剛剛我們討論到 rStar 的成本很高 (32 rollouts)。但如果我們看上表,會發現一個很棒的趨勢。
現象:
- 當 Rollout 次數只有 2 次 (2 Rollouts) 時,rStar 的表現就已經顯著超越了其他的 Baseline (如 RAP 和 SC)。
- 曲線在 8~16 次 Rollout 時就已經趨於飽和,後面的提升幅度變小。
這回應了我們剛才對成本的擔憂。雖然論文設定是 32 次,但在實際應用中,我們其實可以把 Rollout 砍到 4 次或 8 次。這樣 LLM Call 的次數會大幅下降 (可能只比 SC 多一點點),但依然能享受到 MCTS 帶來的結構化推理優勢。這證明了 rStar 生成的高質量路徑 (High-quality Trajectories)在非常早期就能被找到。
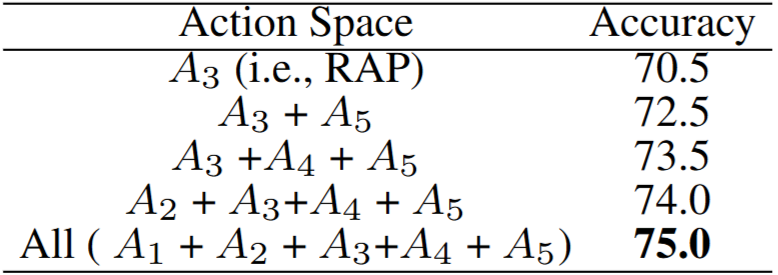
我們花了很多時間討論那 5 個 Action ()。你可能會問:「真的需要搞這麼複雜嗎?只用一招不行嗎?」
上表給出了答案(以 LLaMA3-8B 為例):
- 只用 (像 RAP 方法): 70.5%
- 只用 : 72.5%
- 全部用 (): 75.0%
這證明了 “Rich set of human-like reasoning actions” 的價值。單一的拆解策略(如 RAP)雖然有用,但在面對多樣化的題目時不夠靈活。多加入「重述問題 ()」和「單步/多步切換 ()」,確實能覆蓋更多類型的推理盲點。這也提醒我們,未來的研究方向可以是設計更多樣化的推理動作。
5 結語
最後總結本篇論文三個最重要的核心觀念:
- Inference Scaling Laws: 這篇論文證明了,除了在訓練端 (Pre-training/Fine-tuning) 堆算力,我們也可以在**推理端(Inference-time)**堆算力 (透過 Search 和 Verification) 來大幅提升模型能力。這是不需要重訓模型就能變強的路徑。
- Mutual Reasoning: 「自我驗證」很難,但「互助驗證」(填空題測試) 很有效。這種透過一致性 (Consistency) 而非直接評分 (Scoring) 的驗證方法,是解決 Reward Model 難訓練的一個巧妙解法。
- MCTS as a Prompting Driver: 傳統 MCTS 用於下棋,rStar 把它變成了 Prompt 的調度器。這展示了將經典算法 (Classic Algo) 與 LLM 結合的強大潛力。